

|
CASE01 飲料容器選別ライン 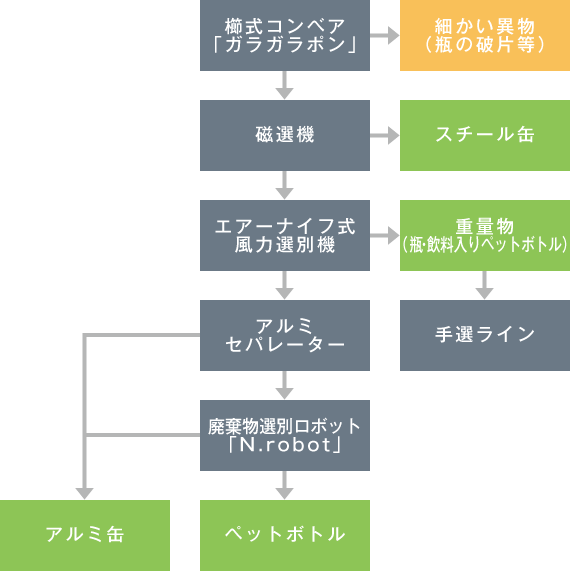
導入の背景 飲料容器の選別は、これまで主に手選別により作業スタッフの手で選別が行われてきました。手選別には人手が必要であり、常に人手不足という課題を抱えていました。 導入後の効果 選別ラインの第1工程で「櫛式コンベア」を設置することで、細かな異物を振るい落とし粗選別します。同時に、作業スタッフは飲料が残っている容器を除去します。 

櫛式コンベア「ガラガラポン」 選別ラインの最初の工程で細かな廃棄物を振るい落として粗選別。これにより後工程で、危険物の混入とコンベアの汚れが軽減。 
磁選機 磁力によりスチール缶を選別。 
エアーナイフ式風力選別機 風力により軽量物(缶・ペットボトル)を飛ばし、重量物(瓶、飲料入りペットボトル)を下に落として選別。重量物は手選ラインで選別。 
アルミセパレーター 回転磁力により、アルミ缶を飛ばして選別。 
廃棄物選別ロボット「N.robot」 アルミセパレーターで選別しきれなかったアルミ缶を「N.robot」により選別。 
プレス機 選別後、アルミ缶、スチール缶はそれぞれプレス機で圧縮。 |